

I am a second-year Ph.D. student at MIT EECS advised by Connor W. Coley.
Previously, I received my B.S. degree from Peking University in 2021 and worked at a biotech startup from 2021 to 2024.
I am a second-year Ph.D. student at MIT EECS advised by Connor W. Coley.
Previously, I received my B.S. degree from Peking University in 2021 and worked at a biotech startup from 2021 to 2024.
Favorite Publications (view all )
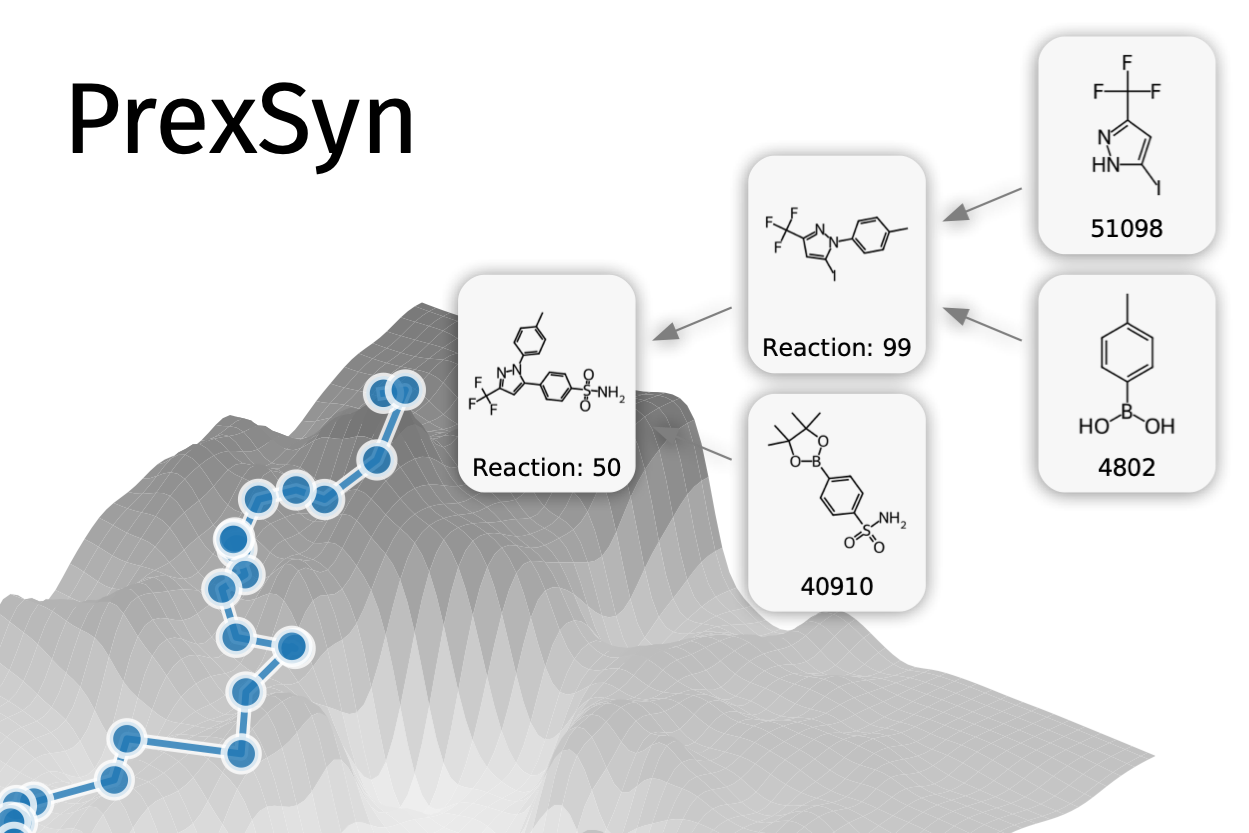
Efficient and Programmable Exploration of Synthesizable Chemical Space
Shitong Luo, Connor W. Coley
Transactions on Machine Learning Research (TMLR) 2026
PrexSyn is based on a decoder-only transformer trained on a billion-scale datastream of synthesizable pathways paired with molecular properties, enabled by a real-time, high-throughput C++-based data generation engine. It sets a new state of the art in synthesizable chemical space coverage, molecular sampling efficiency, and inference speed.
Efficient and Programmable Exploration of Synthesizable Chemical Space
Shitong Luo, Connor W. Coley
Transactions on Machine Learning Research (TMLR) 2026
PrexSyn is based on a decoder-only transformer trained on a billion-scale datastream of synthesizable pathways paired with molecular properties, enabled by a real-time, high-throughput C++-based data generation engine. It sets a new state of the art in synthesizable chemical space coverage, molecular sampling efficiency, and inference speed.
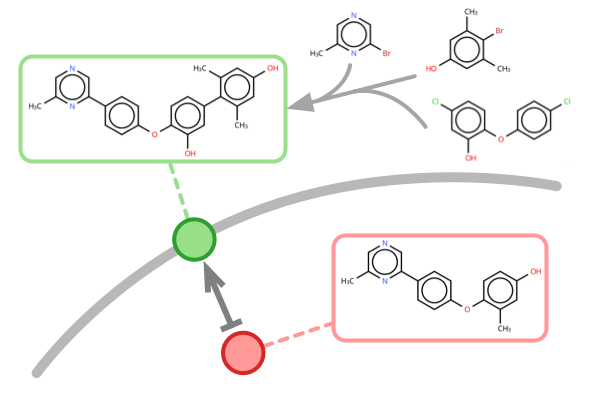
Projecting Molecules into Synthesizable Chemical Spaces
Shitong Luo, Wenhao Gao, Zuofan Wu, Jian Peng, Connor W. Coley, Jianzhu Ma
International Conference on Machine Learning (ICML) 2024
ChemProjector "projects" any molecular graph into a new molecular representation called postfix notation of synthesis that guarantees synthesizability.
Projecting Molecules into Synthesizable Chemical Spaces
Shitong Luo, Wenhao Gao, Zuofan Wu, Jian Peng, Connor W. Coley, Jianzhu Ma
International Conference on Machine Learning (ICML) 2024
ChemProjector "projects" any molecular graph into a new molecular representation called postfix notation of synthesis that guarantees synthesizability.
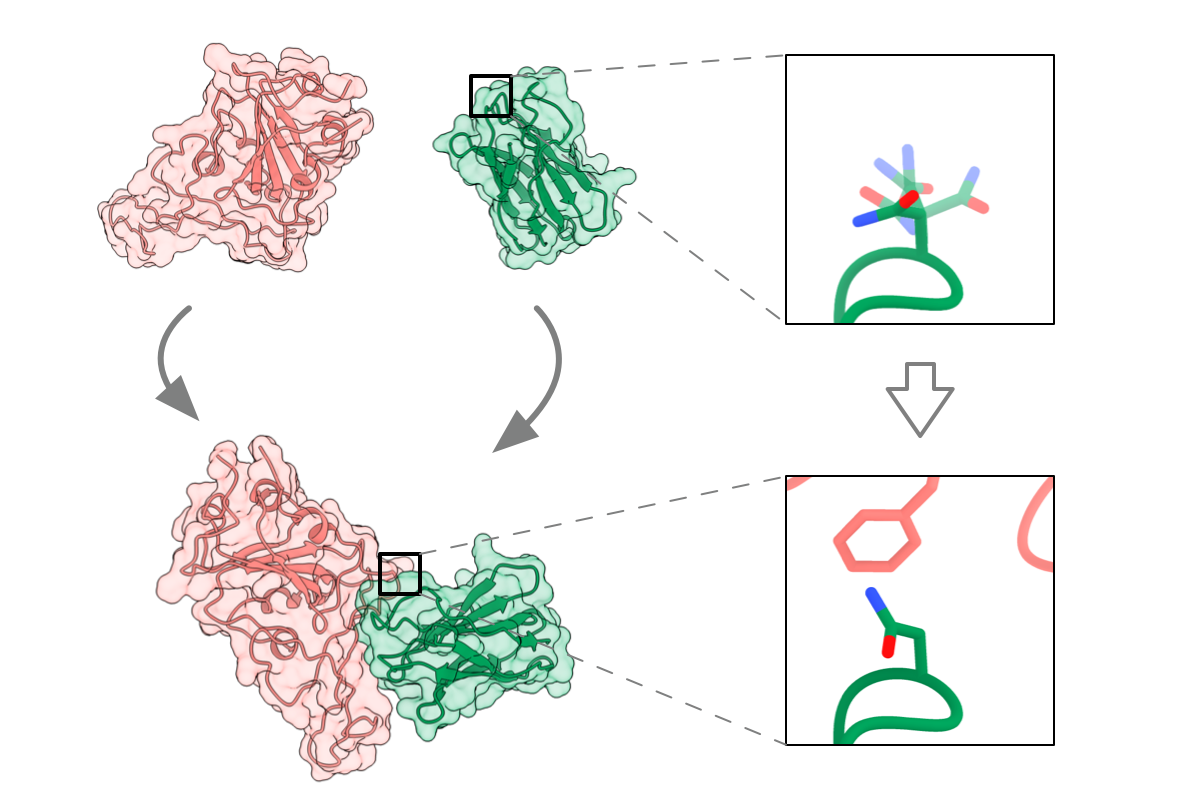
Rotamer Density Estimator is an Unsupervised Learner of the Effect of Mutations on Protein-Protein Interaction
Shitong Luo, Yufeng Su, Zuofan Wu, Chenpeng Su, Jian Peng, Jianzhu Ma
International Conference on Learning Representations (ICLR) 2023
RDE estimates the distribution of amino acid side-chain conformations (rotamers), from which we can predict the effect of mutations on protein-protein interactions by comparing the entropy of the distributions.
Rotamer Density Estimator is an Unsupervised Learner of the Effect of Mutations on Protein-Protein Interaction
Shitong Luo, Yufeng Su, Zuofan Wu, Chenpeng Su, Jian Peng, Jianzhu Ma
International Conference on Learning Representations (ICLR) 2023
RDE estimates the distribution of amino acid side-chain conformations (rotamers), from which we can predict the effect of mutations on protein-protein interactions by comparing the entropy of the distributions.
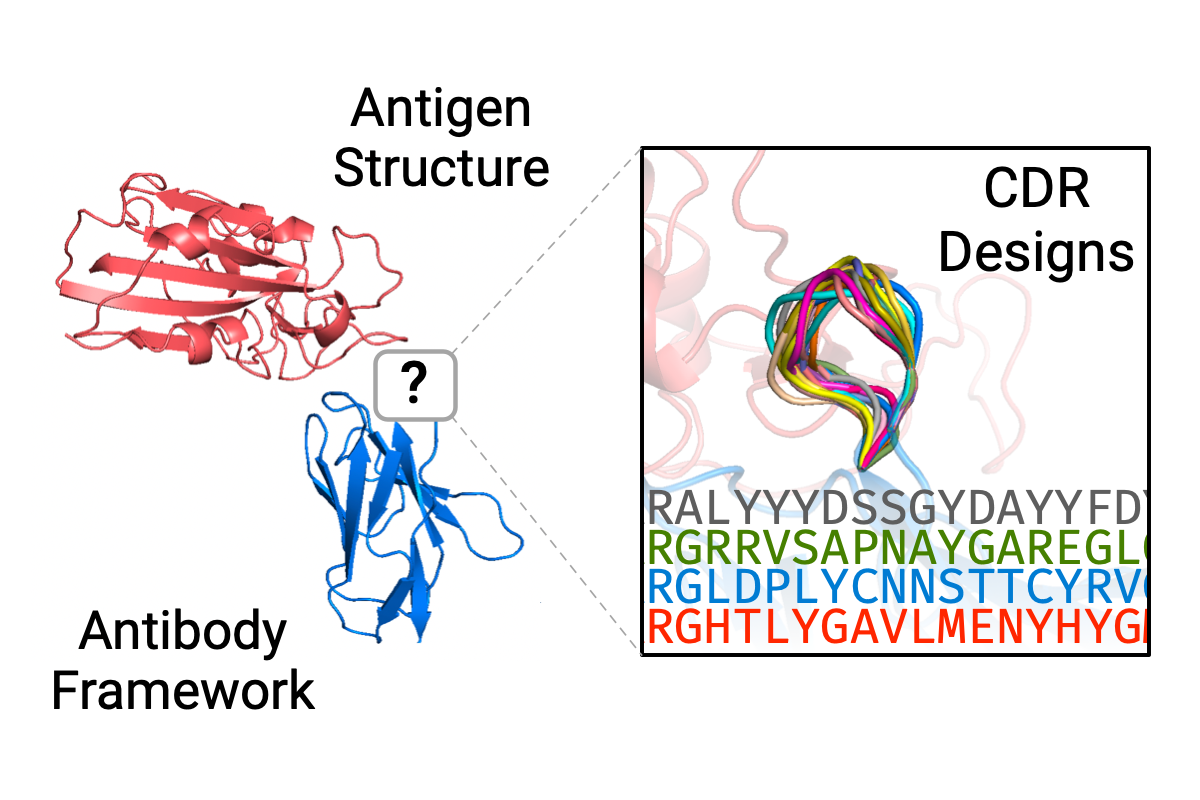
Antigen-Specific Antibody Design and Optimization with Diffusion-Based Generative Models for Protein Structures
Shitong Luo, Yufeng Su, Xingang Peng, Sheng Wang, Jian Peng, Jianzhu Ma
Conference on Neural Information Processing Systems (NeurIPS) 2022
DiffAb is a diffusion model that can design new antibodies and optimize existing ones for antigen binding.
Antigen-Specific Antibody Design and Optimization with Diffusion-Based Generative Models for Protein Structures
Shitong Luo, Yufeng Su, Xingang Peng, Sheng Wang, Jian Peng, Jianzhu Ma
Conference on Neural Information Processing Systems (NeurIPS) 2022
DiffAb is a diffusion model that can design new antibodies and optimize existing ones for antigen binding.
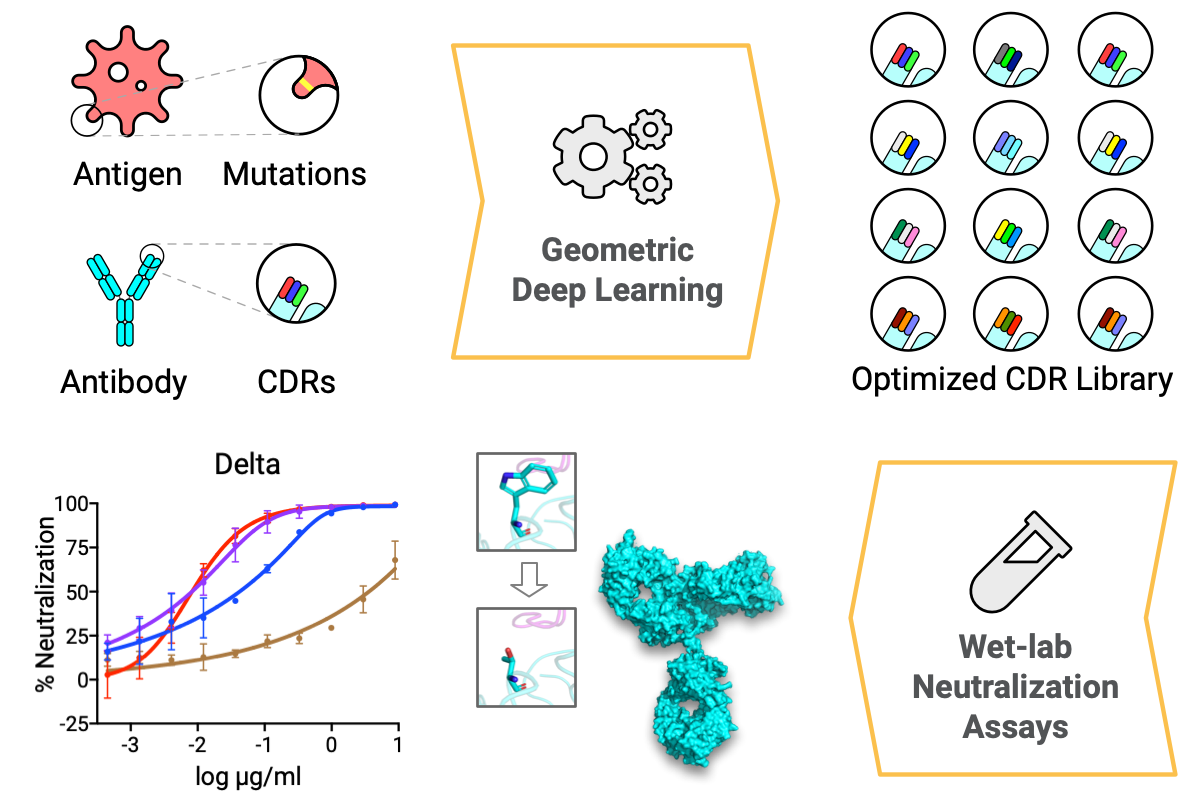
Deep Learning-Guided Optimization of Human Antibody Against SARS-CoV-2 Variants with Broad Neutralization
Sisi Shan*, Shitong Luo*, Ziqing Yang*, Junxian Hong*, Yufeng Su, Fan Ding, Lili Fu, Chenyu Li, Peng Chen, Jianzhu Ma, Xuanling Shi, Qi Zhang, Bonnie Berger, Linqi Zhang, Jian Peng (* equal contribution)
Proceedings of the National Academy of Sciences (PNAS) 2022
Optimizing antibodies against SARS-CoV-2 variants with geometric deep learning, experimentally validated.
Deep Learning-Guided Optimization of Human Antibody Against SARS-CoV-2 Variants with Broad Neutralization
Sisi Shan*, Shitong Luo*, Ziqing Yang*, Junxian Hong*, Yufeng Su, Fan Ding, Lili Fu, Chenyu Li, Peng Chen, Jianzhu Ma, Xuanling Shi, Qi Zhang, Bonnie Berger, Linqi Zhang, Jian Peng (* equal contribution)
Proceedings of the National Academy of Sciences (PNAS) 2022
Optimizing antibodies against SARS-CoV-2 variants with geometric deep learning, experimentally validated.
A 3D Generative Model for Structure-Based Drug Design
Shitong Luo, Jiaqi Guan, Jianzhu Ma, Jian Peng
Conference on Neural Information Processing Systems (NeurIPS) 2021
Learning the distribution of atom occurence in protein binding pockets to generate 3D molecules.
A 3D Generative Model for Structure-Based Drug Design
Shitong Luo, Jiaqi Guan, Jianzhu Ma, Jian Peng
Conference on Neural Information Processing Systems (NeurIPS) 2021
Learning the distribution of atom occurence in protein binding pockets to generate 3D molecules.
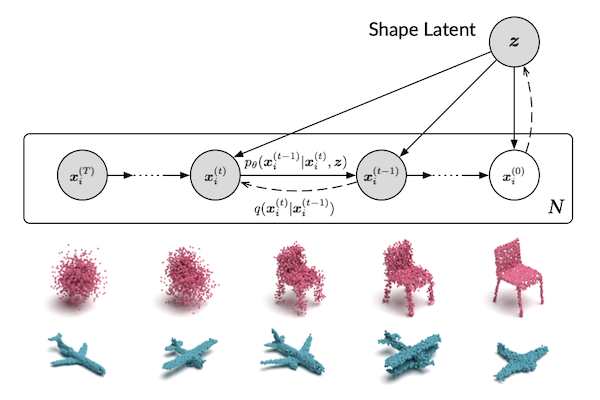
Diffusion Probabilistic Models for 3D Point Cloud Generation
Shitong Luo, Wei Hu
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2021
Simply a diffusion model for 3D point cloud generation.
[Paper] [Code] [Suppl.(Corrected)] [Demo Created by S.H.] [Publication]
Diffusion Probabilistic Models for 3D Point Cloud Generation
Shitong Luo, Wei Hu
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2021
Simply a diffusion model for 3D point cloud generation.
[Paper] [Code] [Suppl.(Corrected)] [Demo Created by S.H.] [Publication]